 资讯
资讯生物进化过(guò)程是通过进化(huà)完善(shàn)的遗传(chuán)程序为(wéi)动物(wù)提供了身体形状,使(shǐ)它们能够在其(qí)主要类型的栖息地有(yǒu)效地移动。但这些适应性往往以(yǐ)在其他环境中(zhōng)的(de)低效表现为代(dài)价。同样,当工(gōng)程师(shī)设计(jì)移(yí)动机器人时,他们倾向于在单一操作环境的基础上选择设备的(de)结构和行(háng)为。其结果(guǒ)是固定的结构和行为,在(zài)一个环境中(zhōng)表现(xiàn)出色,但却影(yǐng)响(xiǎng)了机(jī)器人适应其(qí)他环境的能力。目(mù)前,移动(dòng)机器人的扩散跨越生态监测、仓库管理(lǐ)和(hé)极端(duān)环境(jìng)探(tàn)索,到个人消费者的(de)家中。这(zhè)种不断扩(kuò)大的(de)应用(yòng)前沿要(yào)求机器人在多个(gè)环境(jìng)中运行,这是(shì)传统机器人设计策略尚(shàng)未有效解决的(de)重大挑战。
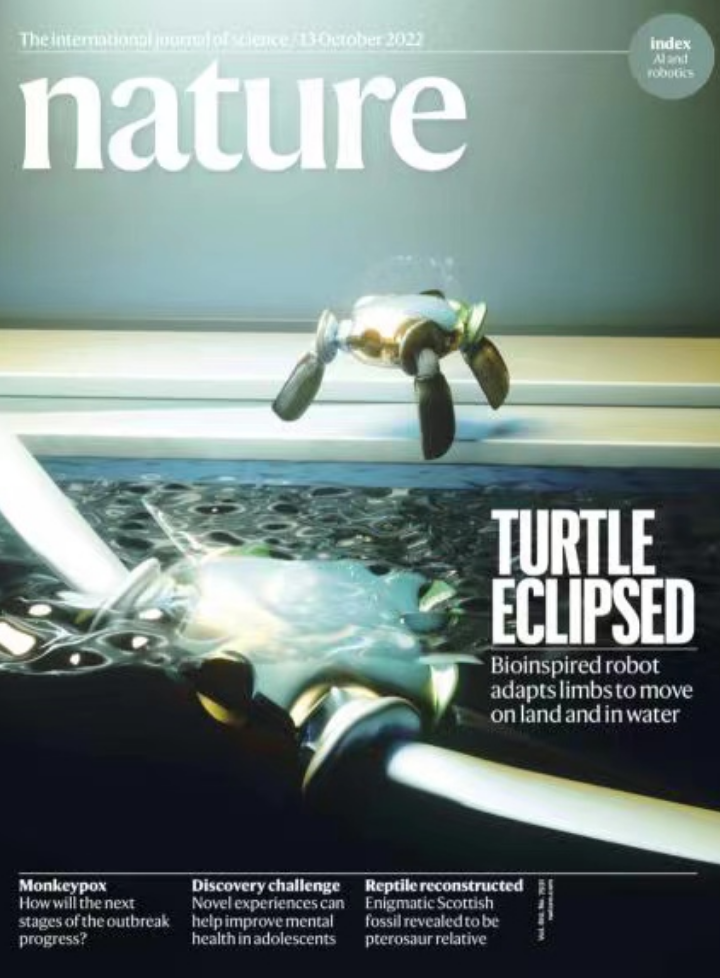
近日,耶鲁大学Rebecca Kramer-Bottiglio教授课题组从(cóng)陆生和水生乌龟身(shēn)上得到的灵感,运用了"适应性形态发生"的设计策略(luè),建造了一个机器(qì)人,它融合了传(chuán)统的(de)刚性部件(jiàn)和(hé)软(ruǎn)性材料(liào),从根本上增强了其四肢的形(xíng)状,并为多环境的(de)运动改变了其步态。步态、肢体形状(zhuàng)和环境介质(zhì)的相互作用证实了控制机器人运(yùn)输成(chéng)本的重要参数。结果证明,自适应形态发生是提高(gāo)移(yí)动机器人遇到非(fēi)结构化、不断(duàn)变化的环(huán)境的(de)效率的有力方法。相关成果以“Multi-environment robotic transitions through adaptive morphogenesis”为题发表在最新一期Nature上,并作为Nature封面。

作者认为,一个机器人(rén)可以通(tōng)过"适应(yīng)性形态发生"来实现跨环境运动的(de)专(zhuān)业化:通过统一(yī)的结构和驱动(dòng)系统(tǒng)来实(shí)现适应性形(xíng)态和行为。为此,作者(zhě)合(hé)并了(le)水生和陆生运动的专(zhuān)门形态特征创(chuàng)造了两(liǎng)栖机器人龟(ART)(图1a)。通过(guò)一个单一的类似乌龟的身体计划,ART通过刺(cì)激(jī)响应(yīng)的软材料和传统(tǒng)的机(jī)器人组件(jiàn)的结(jié)合,采用了自适应(yīng)的形态发生。使用可变刚(gāng)度的复合材料(liào)(图(tú)1b),在一系(xì)列步态的(de)配合下(xià),ART能(néng)够在水(shuǐ)下(xià)游泳,在水面上游泳,在各种(zhǒng)基质上运动,以及在陆地(dì)和(hé)水之间过渡。

图1:海龟启(qǐ)发的两栖机器人
ART的身体有一个(gè)变形肢体,能够根据环境调整其硬度和形状,完全集成到机器人结构中,以获得测试的(de)效(xiào)率(lǜ)。身体包括四个(gè)子系统:底盘、外壳、肩关节和变形肢体。底盘容纳(nà)电子元(yuán)件,外壳(ké)提供流线型、用于浮力调整的压载空间、有效载荷存储和保护(hù)。肩部关节(jiē)在运动学配置中各有三(sān)个马(mǎ)达,以实现一(yī)系列的(de)步态(图(tú)1c)。由一对拮(jié)据(jù)的(de)气动(dòng)执行(háng)器组成的(de)变形肢体与粘附在(zài)热固性聚合(hé)物上的应变限制层连(lián)接到每个肩关节。通过嵌入的(de)加(jiā)热(rè)器加热热(rè)固性材料使其软化,并给气动推杆充气(qì),使肢体的横截面积和硬度发生(shēng)变(biàn)化。这些变化使ART的(de)肢体能(néng)够在(zài)有(yǒu)利于行走的圆柱(zhù)形几何形状和有利于游泳的平鳍几(jǐ)何形状之间进行适应性变形。在水(shuǐ)中测试时,ART的浮(fú)力可调整为表面和水下游泳(图(tú)2a)。随(suí)着四肢变形为(wéi)脚蹼模式,作者研究了划水(shuǐ)和拍打运动。划水步态是一(yī)个相(xiàng)对于机器(qì)人身体向后的划水动作(zuò),随后(hòu)是一个向前和向(xiàng)背的(de)羽化恢复(fù)动作(zuò)。拍打步态的特点是由连续的(de)上冲和下(xià)冲组成的垂直运动轮廓(kuò)。通过将ART固定在一个多轴负(fù)荷传感器上获得的向前(Fx)和向上(Fz)的方向力,阐明了划(huá)水和最佳拍打(dǎ)步态之间的COT差异(图2c,d)。Fx的图表(biǎo)表明,在划水步(bù)态(tài)的恢(huī)复部分产生了反作用力,导致ART明显减速或向后(hòu)移动(图2c)。只有27%的(de)划水动作构成(chéng)了生(shēng)产性(xìng)推力。在拍打步(bù)态的下冲过(guò)程中,ART也会(huì)减速,但(dàn)在95%的冲(chōng)程中保持有(yǒu)成效的Fx推力(图(tú)2d)。

图2:游泳
接着(zhe)作者在瓷片、混(hún)凝土和花岗(gǎng)岩(yán)为代表室(shì)外城市环境的基质上评估了(le)陆地运动(dòng)策略(luè)。作者实施了一种静(jìng)态稳定的爬行步(bù)态,当(dāng)爬行时,ART每(měi)次只有(yǒu)一个(gè)肢体(tǐ)离(lí)开地面(miàn),同时逐步转动其(qí)身体向前移(yí)动(图(tú)3a,b)。ART的左后肢远端在不同基质上匍匐前(qián)进时的(de)三维(wéi)运动捕捉显(xiǎn)示了一致的扫动轨迹和步长,验证了该步态的有(yǒu)效(xiào)性(图3c)。同时运动捕捉数据也(yě)帮助解(jiě)释(shì)不同基质的COT差异。Z轴数据投影(z*)包含(hán)(1)当ART摆动腿部进行踏(tà)步(bù)阶段时(shí)的急剧增加),以及(2)与地形相互作用相(xiàng)应的振动特征(图3d)。z轴数(shù)据在步态周(zhōu)期中的漂(piāo)移(yí)表明ART行走时腿(tuǐ)部逐渐(jiàn)伸展(zhǎn)或收拢。作者计(jì)算了z轴数据与理想(xiǎng)的、完全稳(wěn)定的轨(guǐ)迹(z)的偏差,在(zài)这个过程(chéng)中,ART的肢体将完(wán)全与地面接触(chù),COT和S之间的正相关关系(xì)强调了与基(jī)体保持无滑(huá)移接(jiē)触的重要(yào)性(图3e),与基(jī)体有(yǒu)关的滑(huá)移可归因于(yú)摩擦和地形(xíng)特征(zhēng)。

图(tú)3:行走(zǒu)
作者选择了类(lèi)似于(yú)海滩海龟运动(dòng)的爬行(háng)步态(tài)作为在过渡基质上的运动(dòng)方式。当爬(pá)行时,ART躺在腹部,同(tóng)时利用(yòng)前后肢体(tǐ)串联(lián),略微向上抬起,并向后推,以实现向(xiàng)前推进(图4a、b)。爬行可以分(fèn)散机器人(rén)的(de)重量,减轻灾难(nán)性的(de)滑行,并防止在运动(dòng)过程中被困住。通过爬(pá)行,ART能够成功穿越两种(zhǒng)过渡地形,其(qí)COT值比在陆地上爬行时高(gāo)出140%。作者还做了基质和ART的组成材(cái)料之间进行了摩擦试验(yàn),以(yǐ)解(jiě)释爬(pá)行(háng)时的(de)COT升高。结果显示,外壳的COT与静态(tài)摩擦系(xì)数(μ)之间呈正相关(guān),而肢体材料(liào)的COT与μ之间(jiān)呈负相关(图4c),这(zhè)表明支配COT的主要力学因素是ART的甲壳(ké)沿基质的滑动。

图(tú)4:在过渡基板(bǎn)上爬行
作者将ART在(zài)水中、陆地上(图5a,b)和过(guò)渡基质上的运动策略结合起来,创(chuàng)造了一个从陆地到水(shuǐ)生(shēng)的(de)过渡路(lù)线(图5c)。过渡地点由一(yī)个海洋入口组成,那里有坚硬的鹅卵石土壤,流向潮湿的沙(shā)质区域,然后变成布满岩(yán)石(shí)和植(zhí)物(wù)的浅滩。ART使用腿部模式和匍匐前进的方式来穿越坚硬的土(tǔ)壤部(bù)分。当ART接近(jìn)水面(miàn)时,基质变得(dé)更加(jiā)饱和,它开始爬行,以(yǐ)确(què)保稳定(dìng)性,防(fáng)止(zhǐ)直立步(bù)态的集中点负荷(hé)深入(rù)到基质中。ART并没有(yǒu)在开阔(kuò)的水面上走很远,在变(biàn)形(xíng)之前(qián),它把四肢抬出(chū)水面。当它(tā)在浅水区仅部分被淹没时(shí),它依(yī)靠划水(shuǐ)来游泳。ART记录了它在运输过程中的环境,对其周围环境(jìng)造成的破坏很小。ART的(de)最小(xiǎo)COT性能与许(xǔ)多陆生和水生动物和机(jī)器人(rén)的性能(néng)进行(háng)了(le)比较(图5d)。由于专(zhuān)门针对(duì)多种环境,ART的表现与(yǔ)最先进的单模(mó)态水生或(huò)陆生机器人相近,在某些情况下(xià)甚至(zhì)超过(guò)了后者。最重要的是,ART可以在非(fēi)结构(gòu)化的环境中过渡,同(tóng)时保持(chí)与单模(mó)态(tài)机器(qì)人相当或更好的性能。

图五:实况情景模(mó)拟(nǐ)
小结(jié):在非结构化的(de)动态环境(jìng)中(zhōng),例如陆(lù)地到(dào)水的(de)过渡,作者发现将身(shēn)体形状和行(háng)为视为可以调(diào)整的变量的(de)机(jī)器人设计(jì)可以提高效率(lǜ)。更广(guǎng)泛的含义是,未来(lái)的机器人(rén)可以使用自适应形(xíng)态发生来(lái)专(zhuān)业(yè)化,而不仅仅是一个环境,而是多个(gè)环境。











信息")
信息举(jǔ)报中心")
